HP39gs计算器改装锂电池供电
前言:
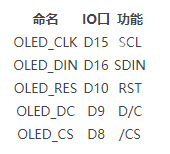
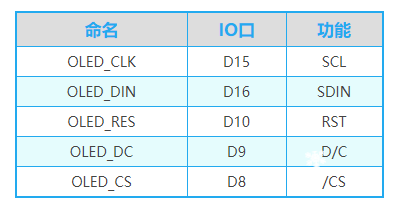
简而言之,就是切断电池仓正极连接,换成锂电池。为锂电池并联一个充电模块,充电模块供电从MINI USB接口取电。ADC电压采样电阻是R17和R18,把R17 换成 1MΩ 、R18 保持 2MΩ 不变,这样修改后,使用锂电池时电压高于3.85V,应当不会再提示Low Bat。按照这个核心方案干就完了,下面全是废话。
(回忆···)
首先说明,下文讲述的笔者是5年前干的事情的,前端时间看见欠陥電気大佬写的搞机贴,觉得此事我可以水一篇博文。那时我还是在校学生,是校电协成员。记不清是哪位朋友发现这款型号为HP 39gs的计算器在某宝以非常便宜的价格销售,仅27.58元。从来没有接触过图形计算器的我,通过搜索引擎了解到这款计算器属于图形计算器,2006年上市,当时售价千元。里面是一枚SAMSUNG S3C2410A ARM处理器,该处理器最高频率约200MHz,在该计算器中,官方设计为75MHz。据说可使用HP Basic编程语言编写程序以在此计算器上运行,另外其不支持CAS,这些我不懂。我们几位社员一合计,咱们也从来没用过图形计算器,现在有机会必须试试。好家伙,这计算器值!于是大家就入手(Keng)了。注:经简单了解,目前此计算器价格有所上涨;另外因年代久远且其设计理念不佳(S3C2410A上运行的Saturn CPU模拟器,然后模拟器上运行SysRPL),所以在当今看来,功能少,运算慢,据说其根本不适合日常工程计算使用。购(Ru)买(Keng)需谨慎!当然,笔者拿来当普通计算器算个加减乘除感觉还是可以的。算的数多了也慢。
基本规格:
| * | |
|---|---|
| 型号: | 惠普 HP 39gs 图形计算器 |
| CPU: | Samsung S3C2410A(ARM920T单核) @75MHz (实际最高约200MHz) |
| Memory: | 256KB RAM (用户实际可用约200KB) ,1MB Flash |
| 通信接口: | USB Mini-B(Kermit 或 XModem协议) , IrDA ,4PIN 3.3V异步串口 |
| 供电: | 4×AAA电池作为主电源 ,CR2032纽扣电池用于数据保持 |
| 屏幕: | 131×64 像素+上方状态条 单色LCD,对比度可调 |
| 语言: | sRPL , HP-Basic |
| 其他: | 内置蜂鸣器,带有硬质保护壳,不支持CAS |
| 上市时间: | 2006年 06月 |
注:上表信息来自维基百科
准备工作:
实践本文内容需要如下硬件准备:
- HP 39gs 计算器
- 合适大小的锂聚合物电池
- 锂电池充电模块
- 导线若干(建议线规约22AWG)
- 螺丝刀(十字 1.0左右)
- 薄型撬片(或撬棒)
- 万用表(选配)
需要在技能树中点亮如下技能:
- 电子产品拆卸技术
- 基础电路知识
- 基本锡焊技术
警告:电子DIY需要有一定的相关知识与技能,操作过程有静电损坏元器件风险,使用烙铁焊接有烫伤风险。请谨慎操作,避免受伤或损坏设备。笔者不会对您的改装行为所造成的任何损失负责!
改装:
我们在使用一周后发现了这一问题,耗电太快了。四枚普通AAA电池,使用一个星期就低电警告了。这对于我们这种穷苦学生怎么承受的了,所以大家想改锂电。原有供电系统为6V,考虑S3C2410A为3.3V IO系统,外围器件也多为3.3V供电,所以考虑单节锂电池供电是可能的。那年正是MPOS火爆推广的时候,1元即可买到一个MPOS还包邮,里面可以拆出拇指电池、4055单节锂电池充电IC、3.3V LDO、高精度运放IC、蓝牙模块、单片机(运气好可能是STM32)。这便给改装提供了思路,杀一只MPOS即可提供电池和锂电池充电IC,如果嫌一节电池容量太小,可以杀两只POS鸡。整个改装过程主要分为以下几步:
- 拆机
- 验证实际工作电压范围
- 查找并改装电压采样
- 制作充电电路
- 装配以完成改装
1.拆机:
该机器拆机简单,首先取下硬质塑料保护壳,使用薄撬片小心取下屏幕保护盖,避免划伤。使用螺丝刀拆下两颗螺丝,然后使用撬片沿机身四周撬开并取下底壳。需小心注意底壳上有电源与蜂鸣器的连接线,避免失手扯断连线。必要可使用烙铁拆焊部分连接线。请牢记各连线焊接位置,必要可拍照记录,以确保在装配时能正确复原。
2.验证工作电压范围:
拆下主电源(电池仓)连接线,临时焊接测试线,连接到数控电源,使用数控电源输出模拟锂电池电压变化。经过粗略测试,电压需要保持在3.68V以上计算器才能正常工作。虽然锂电池可以放电到更低的电压,但是计算器不能在那个电压下正常工作。这表示,虽然使用单节锂电池方案不能完全使用电池的电量,但也是可行的。
3.查找并改装电压采样:
首先检查主板上的所有IC,发现没有ADC。猜测低电检测是使用CPU内置的ADC实现的,4枚AAA电池电压高达6V以上,必有分压电路进行电源电压采样后再输入ADC。一般来说,电压采样电路可能更靠近ADC,此处即应靠近S3C2410A。考虑专业设计一般会引出测试点,先对周围测试点进行电压测量,如果能测到一个会随电源电压变化而变化的电压,大概就是电压采样测试点,如果测不到那就该对周围的电阻两端进行测量,找出会随电源电压变化的点。经过测量发现,S3C2410A右上角的测试点明显符合预期。观察PCB走线,发现与R17和R18有连接。测量两颗电阻阻值分别为1.8MΩ和2MΩ,皆在兆欧级别,也符合电压采样分压电阻的规格。至此,便成功的找到了分压电路。
理论上,接下来通过数控电源提供各种电压进行测试,确定ADC输入的电压低于多少时触发低电提醒。测量后我们确认到的是2.4V,实际电池低电电压与ADC触发电压的差与ADC触发电压的比值即为R17和R18的比值。经过估算,R17 = 1.5MΩ 、R18 = 3.9MΩ应当是个不错的组合。但是实际更换后并不能按照预期提示低电,无论电量多低都没有低电提示,直到电压低至无法开机也没有低电提示。鄙人学艺不精,无法理解什么原因,但这是无法接受的。经过多次实际测试,最终我们选择将R17 换成 1MΩ 、R18 保持 2MΩ 不变,这样计算器大约会在低于3.84V提示低电,充电至高于此电压后便不会出现低电提示。
4.制作充电电路:
可充电的锂电池装到计算器里面,当然不能没有充电电路。大家可以某宝购买TP4055、TP4056等充电模块,价格很便宜。笔者当年使用了中指甲盖大小的一片单面洞洞板,将MPOS机中拆出的4055充电IC整到了上面。4055充电IC为SOT23封装,以左下角为起点1脚,逆时针旋转依次为2~5脚。1脚接充电指示LED负极,LED正极过1K电阻上4脚,与其一同连接至输入+;2脚接GND;5脚为充电电流编程脚,过一个电阻接地,阻值大小视电池容量决定;3脚为输出,连接到电池+。
5.装配:
最后我们需要将计算器装起来,前面如果都能搞定,这个并不难。把电池的正负极与充电模块的输出正负极分别连接,然后连接到计算器的主电池输入。从USB口附近或其他方便的地方引出5V电源和GND到充电模块的输入。切断电池仓正极的连接,把电池粘在底壳合适位置以保证能盖好底壳,然后把充电模块粘在电池仓缝隙处,保证能从外面看到充电指示灯。最后把底壳装回去就大功告成了。